top of page
4 Quadrant Motor Drive Circuit Using MOSFET
วงจร A - 4 Quadrant Motor Drive Circuit ใช้ Logic Gate

การควบคุม Motor โดยใช้ MOSFET สัญญาณที่เอามา Drive Motor นั้นเป็นสัญญาณ PWM โดยใช้ตัว MOSFET เป็นตัวควบคุมการทำงาน วงจร Drive Motor นั้นจึงต้องมีวงจรสร้างสัญญาณ PWM โดยวงจรดังกล่าวสร้างสัญญาณ PWM ได้โดยการเอาสัญญาณ Triangle และ แรงดันไฟตรงมาเปรียบเทียบกัน Output ของวงจรเปรียบเทียบที่ได้ออกมาเป็นสัญญาณ PWM เมื่อได้สัญญาณ PWM แล้ว เราก็เอาสัญญาณนี้มาต่อเข้า Logic Gate มี Not-Gate และ AND-Gate เพื่อไม่ให้ Output Q และ Qbar ของ PWM ทำงานพร้อมกัน, Output จาก Gate ก็เอามาต่อเข้า Optocoupler แรงดัน Output จาก Optocouple ถูกนำมาใช้เป็นตัวควบคุม MOSFET และ MOSFETทั้ง 4 ตัวนี้ทำหน้าที่ควบคุมการทำงานของ Motor แบบ 4 Quadrants คือควบคุมให้ทำงาน หยุดทำงาน ปรับความเร็ว และกลับทิศทางการหมุน
1. วงจรสร้างสัญญาณ Triangle

วงจรสร้างสัญญาณ Triangle ใช้ IC XR2206 เป็นตัวสร้าง ในวงจรมี ตัวต้านทานปรับค่าได้ 1 ตัว R 10K 1 ตัว R 4.7K 2 ตัวและ ตัวเก็บประจุ 3 ตัว ต่อดังในรูป สัญญาณ Output จะออกมาเป็นสัญญาณ Traingle ที่เราสา�มารถปรับความถี่ได้ โดยสัญญาณนี้จะต่อเข้าวงจร Offset อีกทีเพื่อปรับระดับแรงดัน เพราะ Triangle ที่ออกมานั้นลอยขึ้นจาก 0, Output จาก Offset นี้จะนำไปใช้เป็น Input ของวงจร PWM

2. วงจรสร้างสัญญาณ PWM

วงจรสร้างสัญญาณ PWM ประกอบด้วย OP-AMP LM311 2 ตัว R 10 K 2 ตัว ต่อดังในรูป วงจรนี้เอาสัญญาณ Input ที่เป็น Triangle และ ไฟตรง DC มาเปรียบเทียบกัน ได้สัญญาณ Output ออกมาเป็น Pulse ซึ่งเราจะเอา Pulse ทั้ง 2 Output มาต่อเข้า Not-Gate ออกจาก Not-Gate ก็ต่อเข้า AND-Gate ดังรูปในวงจร เสร็จแล้วเอาสัญญาณออกจาก Gate นี้ไปต่อเข้าวงจร Buffer มี่ใช้ OP-AMP 741 ดังในรูปวงจรด้านล่าง


Output PWM ที่มี Q และ Qbar ที่ออกมาจากวงจร Buffer เรานำมาต่อที่ Input ของ OPTO TLP250 2 ชุด ชุตหนึ่ง Input เป็น Q อีกชุดหนึ่ง Input เป็น Qbar PWM Input นี้ต่อเข้าไปจ่ายให้กับ Diode แสงที่อยู่ภายในตัว Opto TLP250 , Diode แสง ส่งแสงเพื่อควบคุมการทำงานของ Transistor ที่อยู่ภายในตัว Opto, Transistor ตัวนี้ก็ทำหน้าที่ควบคุมแรงดันขา G ของ MOSFET ที่ต่อกับ Motor Opto ตัวนี้ทำงานโดยใช้แรงดันไฟตำ มาควบคุมแรงดันไฟสูงเพื่อขับมอเตอร์ที่ต้องการแรงดันสูง


Output ของ Opto แต่ละตัว เราเอามาต่อเข้าขา G ของ MOSFET, MOSFET แต่ละตัวจะต่อ Diode คร่อมไว้ Output ของ Opto ชุดที่ 1 ที่เป็น Q ต่อเข้าขา G ของ MOSFET ตัวที่ 1 และ 4 Output ของ Opto ชุดที่ 2ที่เป็น Qbar ต่อเข้าขา G ของ MOSFET ตัวที่ 2 และ 3 ดังในรูปวงจรเพื่อควบคุมการทำงานของมอเตอร์แบบ 4 Quadrants
นี้เป็นภาพรวมของวงจรควบคุมมอเตอร์แบบ 4 Quadrants โดยปรับ Duty Cycle ของสัญญาณแรงดัน PWM โดยการปรับแรงดันไฟตรง DC ก็จะทำให้แรงดันขา G ของ MOSFET เปลี่ยนแปลงไปตาม Duty Cycle โดบ Duty Cycle จะมีอยู่ 2 ชุดด้วยกันคือ Duty Cycle ของ Q และ Qbar ที่มีช่วงทำงานสลับกัน ถ้า Duty Cycle ของชุดไหนที่มากกว่าก็จะทำให้มอเตอร์หมุนไปในทิศทางนั้น เป็นการควบคุม 4 Quadrant คือควบคุมให้ทำงานหรือยุด ปรับความเร็ว และเปลี่ยนทิศทางหมุนของมอเตอร์ได้

วีดีโอการทดลอง และ อธิบายการทำงานของวงจร A
วงจร B - 4 Quadrant Motor Drive Circuit (มีสัญญาณ Dead Time)

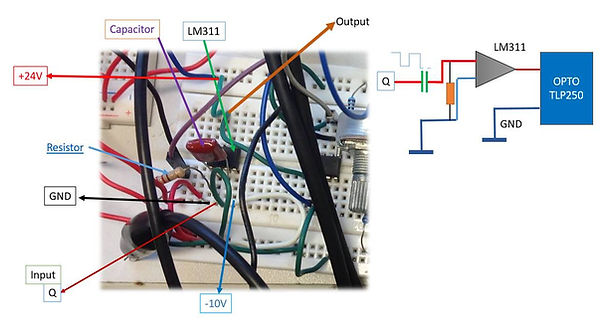
วงจรนี้ต่างกับวงจร A ตรงที่วงจร B นี้มีการเพิ่มการต่อวงจร Dead Time เข้าไปหลังจากการต่อสัญญาณ PWM ออกมาแล้ว โดยเอาสัญญาณ PWM ที่ได้ออกมานั้นมาต่อเข้าวงจร Dead Time ดังในรูปที่มีตัว R 1 ตัว ตัว C 1 ตัว และ LM311 1 ตัว โดยสัญญาณออกมาจะมีลักษณะเหลือม เสร็จแล้วเราก็เอาสัญญาณนี้ที่มีอยู่ 2 ชุดนี้ไปต่อเข้า Opto TLP250 หลังจากนั้นหลักการทำงานของวงจรก็เหมือนเดิมเพียงแต่ว่าสัญญาณที่จัเอาไปขับต่างกันคือ Q และ Qbar จะทำงานพร้อมกันไม่ได้ คือจะป้องกั้นการเสียหายของวงจร


วีดีโอการทดลอง และ อธิบายการทำงานของวงจร B
วงจร A+B - 4 Quadrant Motor Drive Circuit (ต่อ Logic Gate และ มีสัญญาณ Dead Time)

bottom of page